Импульсные стабилизаторы напряжения
Импульсные стабилизаторы напряжения
В импульсных стабилизаторах напряжения используется ключевой элемент (биполярный транзистор, MOSFET, IGBT) относительной длительностью состояний которого ON/OFF можно управлять в зависимости от уровня выходного напряжения. Таким образом, электронный ключ как бы дозирует передачу энергии к выходу тем самым, осуществляя стабилизацию выходного напряжения при изменении нагрузки.
Импульсные стабилизаторы напряжения часто называют DC-DC конверторами [Силовая электроника. Профессиональные решения. Борис Семенов. Солон-Пресс, ДМК Пресс, 2011, 416 c.]. Необходимо помнить, что импульсные стабилизаторы не обеспечивают гальваническую развязку от сети.
Существуют три типа импульсных стабилизаторов напряжения:
- понижающий (ENG = «chopper», «buck converter», «step-down convertor»);
- повышающий (ENG = «boost converter», «step-up convertor»);
- инвертирующий (ENG = «buck-boost converter» ).
Подробное описание каждого из перечисленных типов импульсных стабилизаторов напряжения дано в соответствующих разделах.
Назначение и электрическая схема
Понижающие импульсные стабилизаторы напряжения используются в случаях, когда питающее напряжение имеет большую величину, чем требуемое напряжение питания нагрузки. На практике понижающие импульсные стабилизаторы используются, если входное напряжение питания на 20-200 % превышает напряжение питания нагрузки. Так, например, если входное напряжение составляет от 8-25 В, а выходное стабилизируемое напряжение лежит в пределах 0,5-5 В [Buck-Converter Design Demystified. By Donald Schelle and Jorge Castorena, Jorge Castorena, Technical Staff, Technical Staff, Maxim Integrated Products, Sunnyvale, Calif. Power Electronics Technology. June 2006].
В англоязычной литературе понижающий стабилизатор имеет следующие наименования(ENG = «chopper», «buck converter», «step-down convertor»).
Принципиальная электрическая схема понижающего импульсного стабилизатора напряжения представлена на рисунке BUCK.1.
Рисунок BUCK.1 - Принципиальная электрическая схема понижающего импульсного стабилизатора напряжения
Принцип работы
Принцип работы заключается в следующем. В период времени, когда ключевой транзистор открыт, ток протекает от источника питания через силовой дроссель L в нагрузку Rload и подзаряжает выходной конденсатор фильтра Cout. В следующий период транзистор закрывается и ток, поддерживаемый индуктивностью дросселя L замыкается через диод VD. Далее процесс повторяется. В данном случае ключевой транзистор VT как бы дозирует то время, в течение которого от источника питания потребляется энергия.
Стадии рабочего цикла стабилизатора
В работе схемы четко выражены два периода:
- период потребления энергии длительностью ti;
- период паузы длительностью tp.
Периоды соответствуют двум рабочим контурам:
- контур заряда охватывает цепь: «источник питания» - «ключевой транзистор» - «дроссель» - «конденсатор фильтра//нагрузка». По этому контуру ток протекает на стадии потребления энергии.
- контур разряда охватывает цепь: «диод» - «дроссель» - «конденсатор фильтра//нагрузка». По этому контуру протекает ток на стадии паузы.
Поскольку ток потребляется от источника не в течение всего периода, то на входе стабилизатора присутствует входная ёмкость Cin играющая роль энергетического буфера. Выходная емкость Cout сглаживает пульсации напряжения на нагрузке, обусловленные пульсациями тока дросселя. Понижающий стабилизатор может работать как в прерывистом, так и в непрерывном режиме токов выходного дросселя. Основным является режим непрерывных токов, обеспечивающий меньшие пиковые токи через транзистор, лучшую регулировочную характеристику, меньшую емкость выходного конденсатора и в целом меньшие потери. В связи с этим все дальнейшие соотношения представлены именно для основного режима непрерывных токов. Временные диаграммы, характеризующие процесс работы стабилизатора представлены на рисунке BUCK.2.
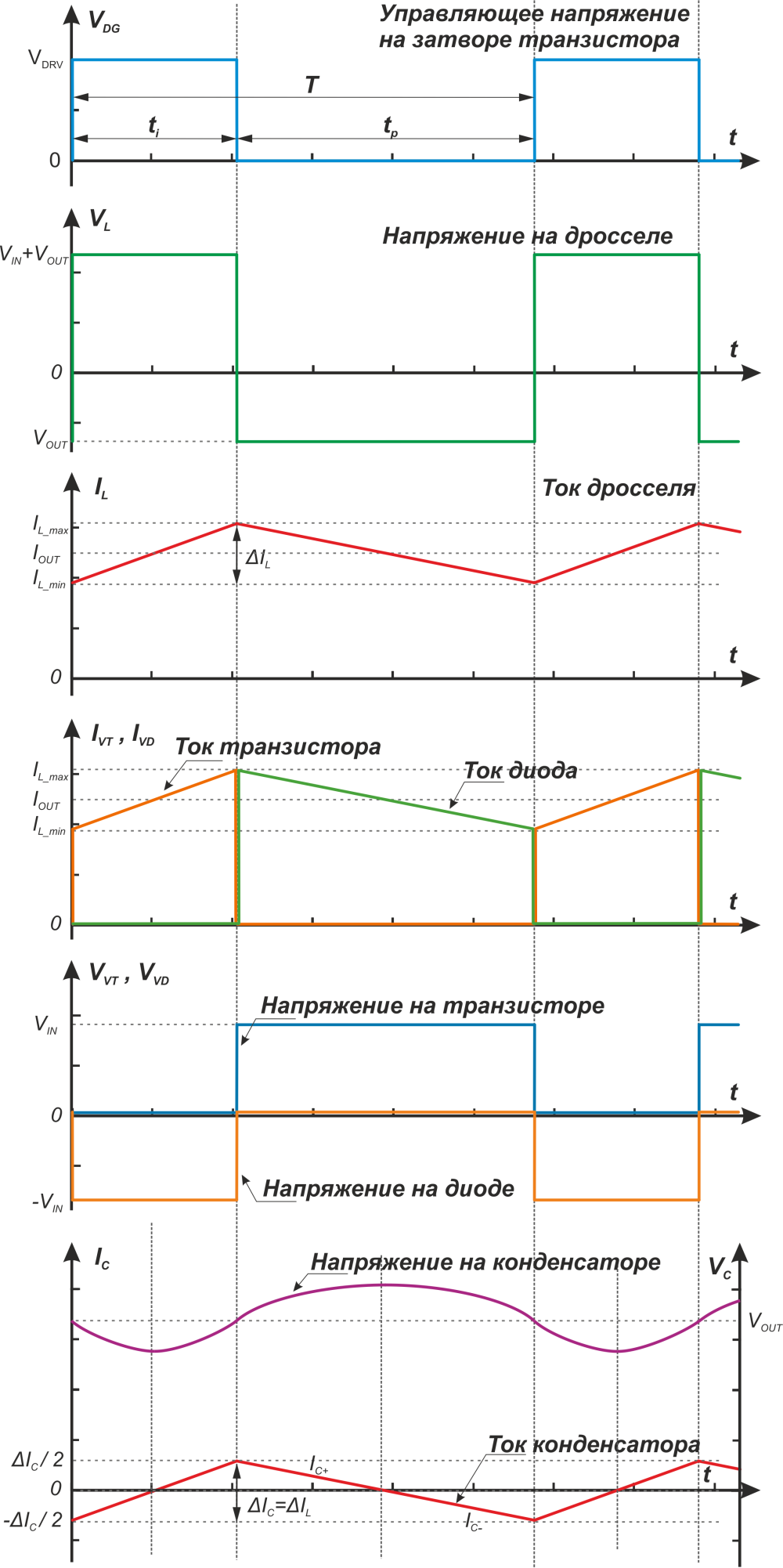
Рисунок BUCK.2 - Временные диаграммы работы импульсного понижающего стабилизатора [Dokic B.L., Blanusa B. Power Electronics: Converters and Regulators. Springer Cham Heidelberg New York Dordrecht London, 2015. XVIII, 598 p.]
Период потребления энергии
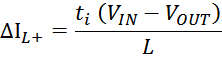
Период потребления энергии начинается, когда сигнал с ШИМ-контроллера открывает ключевой транзистор VT. При этом ток от источника питания протекает по цепи «ключевой транзистор» - «дроссель» - «конденсатор фильтра//нагрузка». К силовому дросселю прикладывается разность входного Vin и выходного Vout напряжений, под действием которой ток через дроссель начинает увеличиваться. Изменение тока дросселя ΔIL+ на стадии потребления энергии определяется выражением:
где:
ti – длительности периода включенного ключа;
L – индуктивность дросселя;
VIN – входное напряжение;
VOUT – выходное напряжение.
До тех пор, пока абсолютное значение тока через дроссель заряжающего конденсатор не превысит ток нагрузки, который разряжает конденсатор, напряжение на последнем будет уменьшаться. Забегая вперед можно сказать, что через половину длительности ti напряжение на конденсаторе фильтра начнет увеличиваться.
В течение всего интервала потребления энергии к диоду VD прикладывается обратное напряжение, равное напряжению источника питания.
Период паузы
Период паузы начинается после выключения транзистора. При этом диод VD открывается и ток «запасенный» в дросселе протекает по цепи «диод» - «дроссель» - «конденсатор фильтра//нагрузка». Силовой дроссель, который к началу паузы набрал максимальный ток, начинает «разряжаться» в конденсатор имеющий напряжение Vout, и ток дросселя начинает снижаться. Изменение тока дросселя ΔIL- на стадии паузы определяется выражением:
где:
tp – длительности периода выключенного ключа;
L – индуктивность дросселя;
VOUT – выходное напряжение.
До тех пор, пока абсолютное значение тока через дроссель не станет меньше тока нагрузки, напряжение конденсаторе будет увеличиваться, после этого момента - уменьшаться. Забегая вперед, можно сказать, что через половину длительности tp напряжение на конденсаторе фильтра начнет уменьшаться.
Спад тока дросселя продолжается до момента следующего интервала потребления энергии. Ток в нагрузке на интервале паузы поддерживается за счет энергии, запасенной в дросселе и конденсаторе фильтра.
Связь входного и выходного напряжения стабилизатора
Выведем соотношение для связи выходного и входного напряжения стабилизатора. В установившемся режиме выполняется условие равенства роста тока дросселя за интервал передачи энергии спаду тока за интервал паузы:
Подставляя в это выражение соотношения для ΔIL+ и ΔIL- получаем:
Проводим ряд преобразований:




Получаем выражение:
Учитывая, что коэффициент заполнения, то есть отношение длительности периода включенного ключа к длительности всего периода повторения импульсов:

где:
ti – длительности периода включенного ключа;
T – период повторения импульсов;
то выражение для VOUT с учетом соотношения для q можно переписать в виде:
где:
q - коэффициент заполнения.
Практически важно, как показывает данное выражение, что выходное напряжение VINлинейно зависит от коэффициента заполнения q.
Из соотношения следует, что для понижающего стабилизатора (в идеализированном случае) требуемое значение коэффициента заполнения следует из отношения:
или:

Пограничный режим, условие перехода в режим разрывных токов
Необходимо понимать, что с уменьшением индуктивности дросселя режим работы стабилизатора приближается к режиму разрывных токов. Критический или вернее пограничный режим, после которого начинается область разрывных токов, определяется условием (см. рисунок BUCK.3):
где:
∆IL – изменение тока дросселя (размах «максимум»-«минимум»).
Откуда следует, что если максимальные пульсации тока дросселя составляют удвоенный ток нагрузки, то стабилизатор переходит в режим разрывных токов:
Выходной ток, в свою очередь равен среднему току через индуктивность:
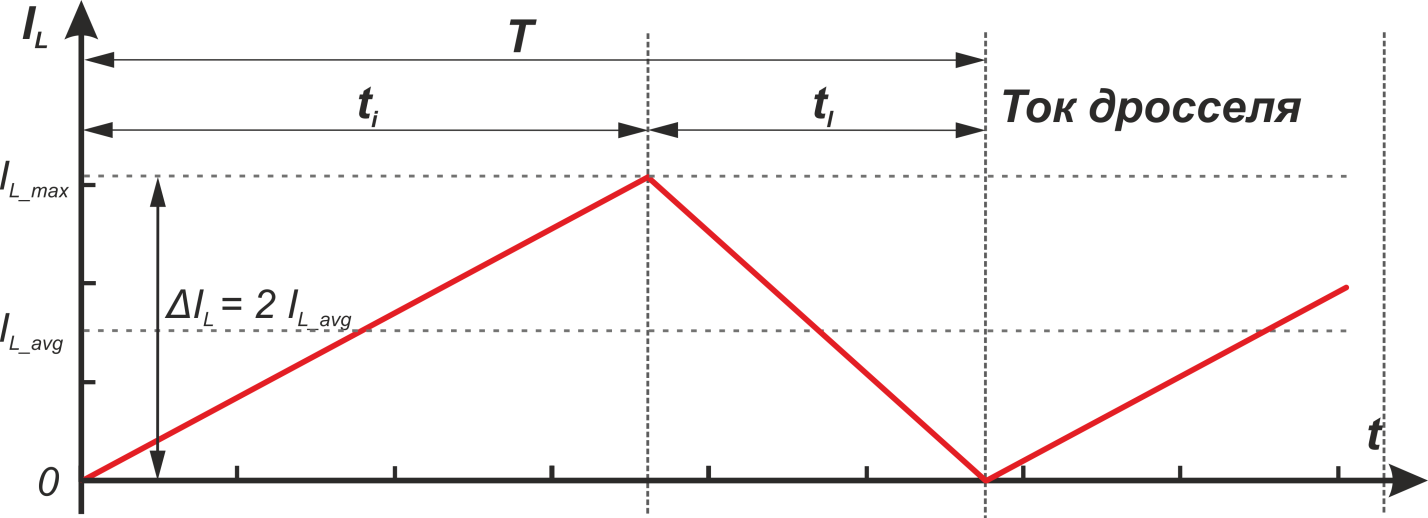
Рисунок BUCK.3 - Пограничный режим работы стабилизатора
Выведем основные соотношения для расчета элементов понижающего импульсного преобразователя.
Расчет параметров элементов понижающего импульсного стабилизатора напряжения
Силовой дроссель
Индуктивность дросселя
Как уже было сказано ранее изменение (пульсации) тока дросселя ΔIL на стадии заряда определяется выражением:
где:
ti – длительности периода включенного ключа;
L – индуктивность дросселя;
VIN – входное напряжение;
VOUT – выходное напряжение.
Выполним ряд преобразований над выражением для пульсаций тока дросселя ΔIL:

где:
f – рабочая частота импульсного стабилизатора;
VIN – входное напряжение;
q - коэффициент заполнения;
L – индуктивность дросселя.
Видно, что абсолютное значение пульсаций тока ΔIL линейно определяется частотой f, индуктивностью дросселя L и входным напряжением VIN. А от коэффициента заполнения наблюдается нелинейная зависимость.
Из предыдущего соотношения следует требование к минимальному значению индуктивности дросселя понижающего преобразователя, которое определяется отношением:
где:
f – рабочая частота импульсного стабилизатора;
ΔIL - пульсации тока дросселя;
q - коэффициент заполнения;
VIN – входное напряжение.
Для практических расчетов величина пульсаций тока дросселя определяется из условия [Buck-Converter Design Demystified. By Donald Schelle and Jorge Castorena, Jorge Castorena, Technical Staff, Technical Staff, Maxim Integrated Products, Sunnyvale, Calif. Power ElectronicsTechnology. June 2006]:

выбираем нижнюю границу диапазона:
где:
IOUT – номинальный выходной ток стабилизатора.
Это приблизительное соотношение подразумевает «золотую середину» между уровнем пульсаций и габаритами дросселя.
Максимальный ток дросселя
Для расчета параметров дросселя важно знать его максимальный ток. Максимальный ток через дроссель IL_maxопределяется из выражения:
Или подставляя выражение для ∆IL получаем:
В практических расчетах ток насыщения надо выбирать с некоторым запасом. Оптимальным является запас в 20% сверх расчётного значения [Buck-Converter Design Demystified. By Donald Schelle and Jorge Castorena, Jorge Castorena, Technical Staff, Technical Staff, Maxim Integrated Products, Sunnyvale, Calif. Power Electronics Technology. June 2006].
NB. Из соотношения для ∆IL следует, что пульсации тока максимальны при q=0.5. Максимальным пульсациям тока соответствует наибольшая величина индуктивности и максимального тока через дроссель. Это практически важно при расчете понижающихся стабилизаторов, рабочий диапазон q которых может переходить через границу 0,5.
Среднеквадратичное значение тока дросселя
Среднеквадратичное значение тока дросселя IL_rms определяется выражением для среднеквадратичного значения треугольных импульсов с постоянной составляющей (см. раздел «Резисторы»):
где:
IOUT – выходной ток;
ΔIL – пульсация тока дросселя.
Выходной конденсатор фильтра
Выходной конденсатор фильтра подавляет пульсации, возникающие на выходе понижающего преобразователя. Ёмкость конденсатора Cout определяет величину пульсаций обусловленных зарядом-разрядом конденсатора. Вторая компонента пульсаций на выходе преобразователя обусловлена эквивалентным последовательным сопротивлением (equivalent-series resistance, ESR) конденсатора.
Емкость конденсатора
Для определения требуемой величины емкости конденсатора обеспечивающий заданный уровень пульсаций необходимо определить насколько конденсатор заряжается в период потребления энергии и в период паузы.
Рассмотрим детально процесса заряда-разряда конденсатора.
Изменение напряжения на конденсаторе в процессе заряда-разряда определяется суммарным балансом токов, заряжающих IC+(t) и разряжающих IC-(t) выходной конденсатор:

При этом само изменение есть интеграл от результирующего тока по времени:
Ток, разряжающий конденсатор в течение всего периода постоянен и равен току нагрузки:
Заряжающий ток IC+ имеет свое выражение на каждом из интервалов:
- период потребления энергии, ключ открыт, ток дросселя растет:
В начальный момент времени интервала (t=0), то есть когда транзистор только что открылся, ток дросселя имеет минимальное значение:

И в начале этот ток меньше разряжающего тока нагрузки IOUT.
С течением времени происходит увеличение тока заряжающего конденсатор по закону:

В итоге суммарный баланс токов, заряжающих-разряжающих выходной конденсатор на интервале потребления энергии равен:


Из выражения видно, что процесс заряда выходного конденсатора начнётся в некоторый момент времени t+start после того как растущий ток через индуктивность сравняется с током Iout (и превысит его). Найдем момент времени t+start.
С учетом того, что выражение для пульсаций тока дросселя ΔIL имеет вид:
То, подставляя это выражение в предыдущее получим:

Отсюда следует, что начало заряда ёмкости (когда ток IC(t) станет положительным) настанет в момент времени равный половине длительности интервала:
То есть конденсатор будет заряжаться оставшуюся половину интервала линейно растущим током:
В этом выражении начальному (нулевому) времени соответствует времени ti/2 а конечному времени – ti. Отсюда длительность времени увеличения напряжения на конденсаторе равна ti/2. При этом рост напряжения на конденсаторе в течение интервала передачи энергии ΔVC_i будет равен:
- период паузы, ключ закрыт, ток дросселя падает:
В начальный момент времени интервала паузы, для упрощения будем считать его нулевым моментом (t=ti) ток поддерживаемые дросселем и заряжающий конденсатор максимален и равен:

Далее с течением времени происходит спад тока заряжающего конденсатор по линейному закону:

В итоге суммарный баланс токов, заряжающих-разряжающих выходной конденсатор равен:

Аналогично предыдущему случаю (интервал передачи энергии), подставляя выражение для пульсаций тока дросселя ΔIL :
Получим:

Найдем момент времени t+final начиная с которого напряжение на конденсаторе начинает спадать. Проводим ряд математических преобразований:


Откуда следует, что начало разряда ёмкости (когда ток IC(t) станет отрицательным) настанет в момент:
Необходимо помнить, что здесь в качестве нулевого момента времени подразумевается время, равное длительности интервала передачи энергии t=ti . Это будет учтено в вычислениях интегралов тока по времени, определяющих рост напряжения.
Отсюда следует, что с начала интервала паузы и до момента времени (T-ti)/2 выходной конденсатор будет заряжаться спадающим током:
Поскольку к моменту времени t=t+final ток через конденсатор будет переходить через ноль, то выражение для заряжающего тока можно переписать в виде:
В этом выражении нулевому времени соответствует время начала интервала паузы ti.
Рост напряжения на конденсаторе в течение паузы ΔVC_p будет равен:
Проводим ряд математических преобразований:



Суммарное увеличение напряжение на выходном конденсаторе происходит как на интервале передачи энергии, так и на интервале паузы:

Суммируя полученные значения для ΔVC_p и ΔVC_i получаем выражение для изменения напряжения на конденсаторе:

Раскрываем скобки и проводим ряд математических преобразований:






Это выражение определяет пульсации напряжения на выходном конденсаторе за счет процесса заряда-разряда конденсатора.
Из выражения следует выражение для емкости выходного конденсатора фильтра Cout :
где:
VIN – входное напряжение;
ΔVСout_disch – величина пульсаций на конденсаторе обусловленная его зарядом-разрядом;
L – индуктивность силового дросселя;
f – рабочая частота импульсного стабилизатора;
q - коэффициент заполнения.
Полученная выше формула ΔVСout_disch определяет только одну компоненту общих пульсаций, связанную с зарядом-разрядом конденсатора. Есть еще пульсации обусловленные величиной ESR выходного конденсатора.
ESR конденсатора
Величина пульсаций определяется величиной ESR выходного конденсатора и рассчитывается по соотношению:

Для практических расчетов можно задаться величиной пульсаций не более 2% от величины выходного напряжения [Buck-Converter Design Demystified. By Donald Schelle and Jorge Castorena, Jorge Castorena, Technical Staff, Technical Staff, Maxim Integrated Products, Sunnyvale, Calif. Power Electronics Technology. June 2006].
Отсюда следует выражение для ESR выходного конденсатора:
В первом приближении, можно считать, что амплитуды пульсаций обусловленных разрядом-зарядом емкости и падением напряжения на ESR конденсатора складываются:

Максимальное напряжение
Максимальное напряжение на выходном конденсаторе равно максимальной величине выходного напряжения VOUT_max :

Входной конденсатор
Емкость конденсатора
Величина емкости входного конденсатора зависит от импеданса входного источника питания. Выполним некоторые математические оценки. Скорость роста тока в цепи питания стабилизатора определяется соотношением:

где:
VIN – входное напряжение стабилизатора;
LPS – индуктивность цепи питания стабилизатора (индуктивность первичного источника);
Отсюда следует, что время ttransient за которое ток в цепи достигнет номинального значения равно:
Поскольку задача выходного конденсатора обеспечить питание стабилизатора в течение этого интервала времени длительностью ttransient , то минимальное значение его емкости должно быть равно:
где:
ΔVCin_disch – пульсации напряжения вследствие разряда конденсатора.
Подставляя выражение для ttransient в предыдущее соотношение получаем выражение для расчета Cin:
Здесь в качестве входного тока необходимо использовать максимальное значение, равное максимальному току через дроссель IL_max. Таким образом, подставляя получаем итоговое выражение:
Падение напряжения вследствие его разряда ΔVCin_disch можно выбрать в пределах 1-2% от величины входного напряжения VIN.
В работе [Buck-Converter Design Demystified. By Donald Schelle and Jorge Castorena, Jorge Castorena, Technical Staff, Technical Staff, Maxim Integrated Products, Sunnyvale, Calif. PowerElectronics Technology. June 2006] рекомендуемое значение емкости для обычных лабораторных источников питания выбирают исходя из эмпирического положения «от 10 мкФ до 22 мкФ на ампер».
ESR конденсатора
Максимальное значение тока, протекающего через входной конденсатор ICin_max равно максимальному току через индуктивность IL_max:

Величина пульсаций напряжения, на входном конденсаторе обусловленных ESRконденсатора равна:

Отсюда следуют требования к ESR входного конденсатора:
Для практических расчетов можно задаться величиной пульсаций ΔVCin_ESR, не превышающих 2% от величины входного напряжения VIN.
Максимальное напряжение
Максимальное напряжение на входном конденсаторе равно максимальной величине входного напряжения VIN_max :

Диод
Диод выбирают в соответствии с максимальной рассеиваемой мощностью и величиной обратного напряжения.
Тепловая мощность, рассеиваемая на диоде определяется соотношением:
Поскольку ток через диод IVD, равен току индуктивности в период разряда IL, который в свою очередь (по среднему значению) равен выходному току, то выражение для IVD имеет вид:

Тогда выражение для мощности, рассеиваемой на диоде PVD примет вид:

где:
q – коэффициент заполнения;
IOUT – максимальное значение выходного тока;
VVD – прямое падение напряжения на диоде.
Максимальное обратное напряжение, прикладываемое к диоду равно входному напряжению стабилизатора VIN:
Ключевой транзистор
Ключевой транзистор выбирают в соответствии с максимальной рассеиваемой мощностью (рабочим током) и величиной обратного напряжения.
Максимальное обратное напряжение
Максимальное обратное напряжение, прикладываемое к транзистору равно входному напряжению стабилизатора VIN:
В реальности возникают выбросы напряжения на транзисторе, обусловленные паразитной индуктивностью цепи стока (коллектора). Методика расчета и меры борьбы указаны ниже в пункте «Выбросы напряжения на транзисторе, обусловленные паразитной индуктивностью цепи стока (коллектора)» настоящего раздела.
Максимальный ток
Максимальное значение тока, протекающего через ключевой транзистор IVT_max равно максимальному току через индуктивность IL_max:
Рассеиваемая мощность
Рассеиваемая на транзисторе мощность складывается из мощности статических потерь PVT_stat, определяющихся падением напряжения на транзисторе и токе через него и динамических потерь PVT_switch, обусловленных переключением:

Мощность статических потерь:
- для MOSFET – транзисторов соотношение для мощности статических потерь имеет вид:

где:
RDS – сопротивление канала «сток-исток» открытого транзистора;
IVT_rms – среднеквадратичное значение тока через транзистор рассчитываемое по соотношению (см. раздел «Резисторы»):
IOUT – выходной ток (максимальное значение);
ΔIL – пульсации тока выходного дросселя.
- для биполярных и IGBT – транзисторов, мощность статических потерь определяется падением напряжения и током через транзистор. Поскольку ток через транзистор IVT, равен току индуктивности который по среднему значению равен выходному току, то выражение для IVT имеет вид:

Тогда выражение для мощности статических потерь для биполярных и IGBT – транзисторов примет вид:

где:
q – коэффициент заполнения;
IOUT –выходной ток (максимальное значение);
VVT – прямое падение напряжения на переходе коллектор-эмиттер.
Мощность динамических потерь:
- для MOSFET – транзисторов мощность динамических потерь PVT_switch рассчитывается по соотношению (см. пункт «Расчет статических и динамических потерь при коммутации MOSFET» раздела «Управление MOSFET и IGBT транзисторами. Схемотехнические решения. Расчет»):

где:
tf – время спада напряжения на транзисторе (в момент коммутации);
tr – время нарастания напряжения на транзисторе (переход в закрытое состояние);
Сoss – выходная емкость транзистора определяемая как сумма ёмкостей «затвор–сток» СGD и «сток-исток» СDS.
Выходная емкость MOSFET-транзистора транзистора Сoss, содержится в datasheet на выбранный тип транзистора. Времена спада и нарастания напряжения на транзисторе tf и trможно рассчитать в соответствии с параметрами выходного каскада ШИМ-контроллера преобразователя или использовать оценочные значения согласно datasheet-у транзистора.
- для биполярных и IGBT – транзисторов мощность динамических потерь PVT_switchрассчитывается по соотношению (см. пункт «Расчет статических и динамических потерь при коммутации IGBT» раздела «Управление MOSFET и IGBT транзисторами. Схемотехнические решения. Расчет»):

где:
Ets – суммарная энергия переключения;
Сoes – выходная емкость транзистора.
Суммарная мощность тепловых потерь на транзисторе определяется как сумма мощностей статических и динамических потерь:

Реальные параметры понижающего стабилизатора
Основные паразитные параметры понижающего стабилизатора
Реальность вносит свои коррективы. Основными паразитными параметрами, влияющими на процесс работы понижающего импульсного стабилизатора являются:
VVT – падение напряжения на ключевом транзисторе;
VVD – падение напряжения на диоде;
RL – сопротивление обмотки дросселя;
Lpar – паразитная индуктивность цепи стока (коллектора).
Принципиальная электрическая схема понижающего импульсного стабилизатора напряжения с учетом основных паразитных параметров представлена на рисунке BUCK.4.
Рисунок BUCK.4 - Принципиальная электрическая схема понижающего импульсного стабилизатора напряжения с учетом основных паразитных параметров
Соотношение взаимосвязи VIN и VOUT с учетом паразитных параметров
Выведем соотношение взаимосвязи входного и выходного напряжения стабилизатора с учетом влияния паразитных параметров.
С учетом паразитных параметров рост тока дросселя ΔIL на стадии заряда определяется выражением:

где:
ti – длительности периода включенного ключа;
L – индуктивность дросселя;
VVT – падение напряжения на ключевом транзисторе;
RL – сопротивление обмотки дросселя;
VIN – входное напряжение;
VOUT – выходное напряжение.
Спад тока дросселя ΔIL- на стадии разряда определяется выражением:

где:
VVD – падение напряжения на диоде.
В установившемся режиме рост тока за период передачи энергии равен спаду за период паузы:

Проводим ряд математических преобразований:






В итоге получаем соотношение, связывающее входное и выходное напряжение:

Или с учетом выражения для коэффициента заполнения:

Отсюда получим соотношение для коэффициента заполнения:
Это выражение показывает необходимое (или вернее сказать корректируемое) значение коэффициента заполнения q с учетом реальных параметров элементов понижающего преобразователя. «Коррекцию» коэффициента заполнения осуществляет ШИМ-контроллер понижающего стабилизатора путем обратной связи. В этом соотношении величина тока через силовой дроссель в первом приближении можно считать равной выходному току преобразователя:

Формула получена из балансного выражения для изменений токов на стадиях «ON-OFF» в процессе работы схемы. Формула учитывает все падения напряжения.
Максимальное выходное напряжение из-за падений напряжений на элементах схемы меньше выходного и равно:

Применение скорректированного соотношения для коэффициента заполнения для расчета элементов стабилизатора
Определим, как изменится соотношение для расчета силового дросселя с учетом реальных параметров схемы. Необходимая величина индуктивности дросселя с учетом всех реальных паразитных параметров может быть выведена из соотношения для спада тока:



И в этом случае индуктивность L должна быть больше чем, если все идеально, поскольку она должна «протянуть ток» преодолевая падение напряжения на VD и RL.
Из соотношения для роста тока:

может быть выведено другое соотношение:

В этом случае L должна быть меньше чем все идеально, поскольку дроссель должен «набрать больше току» (читай - энергии) из за падений напряжения на транзисторе и собственном сопротивлении.
Так каким же должно быть L? Фактически L не изменяется, а изменяется q: (длительность ti возрастает) и уже потом под это q рассчитывается L.
То есть индуктивность дросселя L правильно вычислять по той же формуле:
где q вычисляется по вышеприведенной формуле:
Максимальный ток через дроссель определяется аналогично предыдущему идеализированному выражению:
где q также вычисляется по вышеприведенной «скорректированной» формуле.
Точно так же и параметры других элементов схемы: выходного Cin и входного конденсаторов Cin , диода VD и ключевого транзистора VT определяются по ранее полученным соотношениям, но с учетом «скорректированного» q.
Расчет коэффициента заполнения понижающего стабилизатор на основе интегральных потерь
Существует другой более упрощенный подход к расчету «скорректированного» q на основе учета интегральных потерь мощности во всей схеме стабилизатора.
Выведенное с учетом основных паразитных параметров соотношение для q учитывает основные, но еще не все потери. Есть еще достаточно крупные потери в магнитопроводе дросселя, из мелких есть потери на ESR конденсаторов, потери на сопротивлении проводников печатной платы и другие. И иногда по той или иной причине удобнее считать «скорректированное» q через суммарные потери на основе так называемого энергетического подхода. Выведем, как изменяется коэффициент заполнения q при некоторой вносимой мощности потерь Ploss относительно идеализированного случая. Соотношение баланса мощностей с учетом потерь запишем в виде:

где:
Ploss – мощность потерь;
PIN – входная (потребляемая) мощность;
POUT – выходная мощность.
Подставляя выражения для мощностей PIN и POUT для идеализированного случая) получаем:


Отсюда следует, что время включенного состояния ключа должно увеличиться для того чтобы скомпенсировать потери.
Приращение времени Δti определяется из выражения:
Для того чтобы выполнялось соотношение:
Необходимо чтобы два последних слагаемых друг друга компенсировали:
Отсюда:
Проводим ряд математических преобразований:
Поскольку из базового соотношения:
следует выражение:

Подставляя которое предыдущую формулу получаем:
Откуда, переходя к коэффициенту заполнения:
где:
q – «идеализированный» коэффициент заполнения, рассчитанный для случая без потерь;
Δq – увеличение коэффициента заполнения относительного «идеализированного» значения;
Ploss – мощность потерь;
POUT – выходная мощность.
Это простое выражение показывает, как изменяется (увеличивается) коэффициент заполнения при внесении определенной мощности потерь Ploss.
Выбросы напряжения на транзисторе, обусловленные паразитной индуктивностью цепи стока (коллектора)
Для понижающего импульсного стабилизатора существует проблема выбросов напряжения на стоке (коллекторе) транзистора, обусловленных резким разрывом тока, протекающего через паразитную индуктивность конура Lpar. В случае если энергия запасаемой в паразитной индуктивности превышает энергию поглощаемую емкостью стока (коллектора) транзистора – выходная емкость, то возможен выход ключевого элемента из строя. Критерий наличия или отсутствия проблемы перенапряжения выражается как:

где:
Lpar – паразитная индуктивность цепи стока (коллектора);
IL_max – максимальная величина тока силового дросселя, равная току через Lpar (разрыв тока происходит при максимальном токе);
Coss – выходная емкость транзистора (Output Capacitance) - указана в datasheet на транзистор;
VVT_max – максимальное напряжение на транзисторе.
VIN – входное напряжение;
VVD – выходное напряжение.
Если расчеты показывают, что энергия индуктивного выброса способна перезарядить емкость транзистора то необходимо принимать меры следующего содержания:
- использовать транзистор с большим рабочим напряжением;
- «переразвести» плату, уменьшив величину паразитной индуктивности печатных проводников;
- подключить конденсатор с малыми ESR и ESL между шиной питания и землей как можно ближе к силовому транзистору. Это уменьшит величину Lpar ;
- использовать защитные ограничители напряжения на основе TVS-диодов, подключаемые параллельно и непосредственно вблизи выводов сток-исток (но это крайняя мера).
Алгоритм расчета понижающего импульсного стабилизатора напряжения
1. Определение исходных параметров расчета
Это, по сути, техническое задание на проектирование стабилизатора напряжения:
- определение входного напряжения VIN и диапазона его изменения VIN_min - VIN_maxесли источник регулируемый;
- определение выходного напряжения VOUT и диапазона его регулировки VOUT_min - VOUT_max если источник регулируемый;
- определение выходного тока IOUT и диапазона его изменения IOUT_min - IOUT_max если нагрузка изменяется;
- максимальная величина пульсаций выходного напряжения ΔVOUT ;
- определение LPS – индуктивности цепи питания стабилизатора (индуктивность первичного источника).
Если заданы фиксированные значения входных или выходных параметров, то в дальнейших расчетах максимальные и минимальные значения, указанные в формулах принимаются равными номинальному значению.
2. Определение максимального и минимального значений коэффициента заполнения
- В случае если входное и выходное напряжения фиксированы, то значение коэффициента заполнения q рассчитывается по соотношению:
где:
VOUT - номинальное выходное напряжение;
VIN - номинальное входное напряжение;
q - коэффициент заполнения.
- В случае если входное напряжение изменяется, а выходное напряжение фиксировано (самый распространенный случай), то максимальное и минимальное значение коэффициента заполнения q рассчитывается по соотношению:
где:
VOUT - номинальное выходное напряжение;
VIN_max , VIN_min - – максимальное и минимальное значение входного напряжения соответственно;
qmax , qmin – максимальное и минимальное значение коэффициента заполнения соответственно.
- В случае если входное и выходное напряжение изменяется, (самый сложный случай), то значение коэффициента заполнения q рассчитывается по соотношению:
где:
VOUT_max , VOUT_min – максимальное и минимальное значение выходного напряжения соответственно;
VIN_max , VIN_min – максимальное и минимальное значение входного напряжения соответственно;
qmax , qmin – максимальное и минимальное значение коэффициента заполнения соответственно.
3. Выбор контроллера и определение рабочей частоты преобразователя
ШИМ-контроллер понижающего импульсного стабилизатора выбирается исходя из возможностей текущей элементной базы, требований по энергопотреблению, массогабаритным и экономическим показателям. Рабочая частота импульсного стабилизатора f выбирается соответственно характеристикам контроллера, силового ключа, и частотным характеристикам феррита магнитопровода.
4. Расчет параметров силового дросселя L
Расчет индуктивности дросселя
Определяем коэффициент заполнения qΔImax при котором пульсации тока дросселя максимальны. Пульсации тока дросселя будут максимальны, если внутри диапазона [qmax - qmin] расположено значение 0,5, при этом:
В случае, если диапазон [qmax - qmin] лежит слева или справа от значения 0,5 то используется максимально близкое к этой величине значение.

Индуктивность дросселя понижающего стабилизатора определяется исходя из значения максимального тока пульсаций:

где:
qΔImax – коэффициент заполнения при котором пульсации тока максимальны;
VIN_max – максимальное значение входного напряжения соответственно;
qmax , qmin – максимальное и минимальное значение коэффициента заполнения соответственно;
f – рабочая частота импульсного стабилизатора;
ΔIL - пульсации тока дросселя.
Величина пульсаций тока дросселя определяется из условия [Buck-Converter Design Demystified. By Donald Schelle and Jorge Castorena, Jorge Castorena, Technical Staff, Technical Staff, Maxim Integrated Products, Sunnyvale, Calif. Power Electronics Technology. June 2006]:

выбираем нижнюю границу диапазона:
где:
IOUT – номинальное значение выходного тока (в случае, если номинальное значение не задано, то в качестве IOUT используется среднее между максимальным и минимальным значением параметра).
Это приблизительное соотношение подразумевает «золотую середину» между уровнем пульсаций и габаритами дросселя: Чем меньше индуктивность дросселя, тем больше пульсации и меньше габариты и наоборот.
Расчет максимального тока через дроссель
Максимальный ток через дроссель IL_max определяется из выражения:

При расчете конструкции дросселя ток насыщения надо выбирать с некоторым запасом в 20-25 % относительно рассчитанного значения.
Расчет среднеквадратичного значения тока через дроссель
Среднеквадратичное значение тока через дроссель определяется из выражения:
где:
IOUT_max – максимальное значения выходного тока;
ΔIL – пульсация тока дросселя.
Полученные параметры являются входными данными для проектирования дросселя.
5. Расчет параметров выходного конденсатора фильтра Cout
Определение максимального напряжения VCout_max
Максимальное напряжение на выходном конденсаторе равно максимальной величине выходного напряжения VOUT_max :
При выборе типа конденсатора его максимальное напряжение должно минимум на 20-25 % превышать рассчитанное значение для безопасной работы.
Расчет составляющих выходных пульсаций ΔVOUT
Составляющая пульсаций ΔVСout_disch , обусловленная его зарядом-разрядом выбирается в пределах 10-50% от величины выходных пульсаций ΔVOUT :

Отсюда вычисляется остающаяся на долю ESR величина пульсаций:

Расчёт емкости выходного конденсатора фильтра Cout
Рассчитываем минимальное значение емкости выходного конденсатора фильтра Cout :

где:
qΔImax – коэффициент заполнения при котором пульсации тока максимальны (пульсации напряжения максимальны когда максимальны пульсации тока).
VIN_max – максимальное входное напряжение;
L – индуктивность силового дросселя;
f – рабочая частота импульсного стабилизатора;
ΔVСout_disch – величина пульсаций на конденсаторе обусловленная его зарядом-разрядом.
Расчет ESR выходного конденсатора
Максимальное значение ESR выходного конденсатора ESRCout рассчитывается по соотношению:
где:
ΔIL – пульсации тока выходного дросселя;
ΔVСout_ESR – пульсации напряжения на конденсаторе, обусловленные падением напряжения на его ESR.
6. Расчет параметров входного конденсатора Cin
Определение максимального напряжения VCin_max
Максимальное напряжение на входном конденсаторе равно максимальной величине входного напряжения VIN_max :
При выборе типа конденсатора его максимальное напряжение должно минимум на 20-25 % превышать рассчитанное значение для безопасной работы.
Расчет составляющих выходных пульсаций ΔVIN
Падение напряжения в результате разряда конденсатора ΔVCin_disch выбирается в пределах 1-2% от величины минимального входного напряжения VIN_min:

Аналогично выбираем величину пульсаций на входном конденсаторе обусловленных его ESR ΔVCin_ESR - в пределах 1-2% от величины входного напряжения VIN_min.

Расчет емкости входного конденсатора
Минимальное значение емкости входного конденсатора Cin рассчитывается по соотношению:
где:
IL_max – максимальный ток дросселя;
VIN_min – минимальное входное напряжение стабилизатора;
LPS – индуктивность цепи питания стабилизатора (индуктивность первичного источника);
ΔVCin_disch – падение напряжения вследствие разряда конденсатора.
Если значение индуктивности подводящих цепей неизвестно, то рекомендуемое значение емкости Cin для обычных лабораторных источников питания выбирают исходя из эмпирического положения «от 10 мкФ до 22 мкФ на ампер».
Расчет ESR входного конденсатора
Максимальное значение ESR входного конденсатора ESRCin рассчитывается по соотношению:
где:
IOUT_max – максимальное значение выходного тока стабилизатора;
ΔIL – пульсации тока дросселя;
ΔVCin_ESR – пульсации на конденсаторе обусловленные его ESR.
7. Расчет параметров ключевого транзистора VT
Расчет максимального обратного напряжения
Максимальное обратное напряжение VVT_max, прикладываемое к транзистору равно максимальному значению входного напряжению стабилизатора VIN_max:

В реальности максимальное напряжение должно на 20-25 % превышать рассчитанное значение (дать запас на выбросы напряжения на транзисторе, и обеспечить область его безопасной работы).
Расчет максимального тока
Максимальное значение тока, протекающего через ключевой транзистор IVT_max равно максимальному току через индуктивность IL_max:

Согласно полученным значениям VVT_max и IVT_max выбираем, в первом приближении, конкретную модель ключевого транзистора. Согласно datasheet определяем сопротивление канала в открытом состоянии RDS.
Расчет среднеквадратичного значения тока
Среднеквадратичное значение тока через транзистор IVT_rms рассчитывается по соотношению (см. раздел «Резисторы»):

где:
qmax – максимальное значение коэффициента заполнения;
IOUT_max – максимальное значение выходного тока;
ΔIL – пульсации тока выходного дросселя.
Выбор типа транзистора
На основе полученных значений максимального напряжения VVT_max, максимального IVT_max и среднеквадратичного значения IVT_rms токов, рабочей частоты и конструктивных требований осуществляется (в первом приближении) выбор конкретного типа используемого транзистора. В случае необходимости тип транзистора может быть изменен в процессе расчета. Для дальнейших расчетов потребуются конкретные численные значения параметров выбранного транзистора. Согласно datasheet определяем сопротивление канала в открытом состоянии RDS.
Расчет рассеиваемой мощности
Рассеиваемая мощность PVT_stat складывается из мощности статических потерь и динамических потерь:

Мощность статических потерь для MOSFET – транзисторов равна:
где:
RDS – сопротивление канала «сток-исток» открытого транзистора;
IVT_rms – среднеквадратичное значение тока через транзистор.
Выделяемая в кристалле MOSFET транзистора мощность динамических потерь PVT_switchрассчитывается по соотношению (см. пункт «Расчет статических и динамических потерь при коммутации MOSFET» раздела «Управление MOSFET и IGBT транзисторами. Схемотехнические решения. Расчет»):

где:
tf – время спада напряжения на транзисторе (в момент коммутации);
tr – время нарастания напряжения на транзисторе (переход в закрытое состояние);
Сoss – выходная емкость транзистора, определяемая как сумма ёмкостей «затвор–сток» СGD и «сток-исток» СDS.
Выходная емкость MOSFET-транзистора транзистора Сoss, содержится в datasheet на выбранный тип транзистора. Времена спада и нарастания напряжения на транзисторе tf и trможно рассчитать в соответствии с параметрами выходного каскада ШИМ-контроллера (см. раздел «Управление MOSFET и IGBT транзисторами. Схемотехнические решения. Расчет») или использовать оценочные значения согласно datasheet-у транзистора.
Мощность статических потерь в случае использования в понижающем стабилизаторе для биполярных и IGBT – транзисторов равна:

где:
qmax – максимальное значение коэффициента заполнения;
IOUT_max – максимальное значение выходного тока;
VVT – прямое падение напряжения на переходе коллектор-эмиттер VCE.
Выделяемая в кристалле IGBT транзистора мощность динамических потерь PVT_switchрассчитывается по соотношению (см. пункт «Расчет статических и динамических потерь при коммутации IGBT» раздела «Управление MOSFET и IGBT транзисторами. Схемотехнические решения. Расчет»):

где:
Ets – суммарная энергия переключения;
Сoes – выходная емкость транзистора.
Суммарная мощность тепловых потерь на транзисторе определяется как сумма мощностей статических и динамических потерь:
8. Расчет параметров диода VD
Расчет максимального обратного напряжения
Максимальное обратное напряжение, прикладываемое к диоду VVD_max равно максимальному входному напряжению стабилизатора VIN_max:

Расчет максимального тока
Максимальное значение тока, протекающего через диод IVD_max равно максимальному току через индуктивность IL_max:

Выбор типа диода
На основе полученных данных максимального напряжения и тока, рабочей частоты и конструктивных требований осуществляется выбор конкретного типа диода. В случае необходимости тип диода может быть изменен в процессе расчета.
Расчет рассеиваемой мощности
Тепловая мощность, рассеиваемая на диоде рассчитывается по выражению:

где:
qmin – минимальное значение коэффициента заполнения;
IOUT_max – максимальное значение выходного тока;
VVD – прямое падение напряжения на диоде (для кремниевых диодов типовым значением является 1,2 В, для диодов Шоттки - 0,8 В).
9. Расчет конструкции силового дросселя понижающего стабилизатора напряжения
Расчет конструкции силового дросселя стабилизатора напряжения осуществляется согласно алгоритму, описанному в пункте «Последовательность расчета силового дросселя» раздела «Индуктивности» с учетом конкретных рекомендаций для проектирования дросселя понижающего стабилизатора напряжения, представленных в пункте «Силовые дроссели понижающего, повышающего и инвертирующего стабилизаторов» раздела «Индуктивности».
Входными данными для проектирования являются:
- L – индуктивность дросселя;
- IL_max – максимальный ток дросселя (величина берется с запасом на 25-30 % относительно полученной);
- IL_rms – среднеквадратичное значение тока дросселя (величина берется с запасом на 25-30 % относительно полученной);
- рабочая частота f.
Выходными данными являются:
- конструктив дросселя;
- RL – сопротивление обмотки дросселя.
10. Коррекция коэффициента заполнения q c учетом параметров реальной схемы. Уточнение параметров схемы стабилизатора
Данный шаг алгоритма расчета в принципе не является обязательным. Но, тем не менее, во избежание «сюрпризов», его лучше выполнить.
После выполнения шагов 1-9 последовательности расчета становятся известными реальные параметры элементов схемы:
L – индуктивность дросселя;
RL – сопротивление обмотки дросселя;
IL_max – максимальный ток дросселя;
VVD – падение напряжения на диоде.
Расчет падения напряжения на транзисторе
Падение напряжения на ключевом транзисторе VVT определяется следующим образом:
- для MOSFET – транзисторов:

- для IGBT – транзисторов:
здесь VCE – прямое падение напряжения на переходе коллектор-эмиттер VCE.
Расчет корректированного значения коэффициента q*
- В случае если входное и выходное напряжения фиксированы, то значение скорректированного коэффициента заполнения q* рассчитывается по соотношению:
где:
VOUT - номинальное выходное напряжение;
VIN - номинальное входное напряжение;
q* – скорректированный коэффициент заполнения.
- В случае если входное напряжение изменяется, а выходное напряжение фиксировано (самый распространенный случай), то максимальное и минимальное значение скорректированного коэффициента заполнения q* рассчитывается по соотношению:


где:
VOUT - номинальное выходное напряжение;
VIN_max , VIN_min - – максимальное и минимальное значение входного напряжения соответственно;
qmax*, qmin* – максимальное и минимальное значение скорректированного коэффициента заполнения соответственно.
- В случае если входное и выходное напряжение изменяется, (самый сложный случай), то значение скорректированного коэффициента заполнения q* рассчитывается по соотношению:


где:
VOUT_max , VOUT_min – максимальное и минимальное значение выходного напряжения соответственно;
VIN_max , VIN_min – максимальное и минимальное значение входного напряжения соответственно;
qmax*, qmin* – максимальное и минимальное значение скорректированного коэффициента заполнения соответственно.
В ряде случаев полученное значение скорректированного коэффициента заполнения qmax* будет превышать единицу. В этом случае qmax* принимается равной единице и констатируется невозможность обеспечения заданного значения максимального выходного напряжения стабилизатора (при минимальном значении выходного напряжения). Максимальное значение выходного напряжения стабилизатора в этом случае ограничивается на уровне:

Определение корректированного коэффициента заполнения qΔImax* при котором пульсации тока дросселя максимальны
Далее определяем с учетом коррекции коэффициент заполнения qΔImax* при котором пульсации тока дросселя максимальны. Пульсации тока дросселя будут максимальны, если внутри диапазона [q_max*- q_min*] расположено значение 0,5, при этом:
В случае, если диапазон [qmax*- qmin*] лежит слева или справа от значения 0,5 то используется максимально близкое к этой величине значение.

Расчет величины пульсаций тока дросселя ∆IL* с учетом коррекции
Рассчитывается величина пульсаций с учетом коррекции на реальные параметры стабилизатора:

Определение необходимости пересчета, и случае необходимости, пересчет индуктивности дросселя и емкости выходного конденсатора фильтра
Далее принимается решение о необходимости пересчета:
- В случае если коррекция, учитывающая реальные параметры стабилизатора не существенно влияет на величину тока пульсаций ∆IL (то есть не превышает их на величину более 10-20 %):

то имеет смысл оставить все как есть и считать, что расчет закончен.
- В случае если величина ∆IL изменяется существенно:

то необходим пересчёт следующих параметров стабилизатора:
- индуктивность дросселя L;
- емкость выходного конденсатора фильтра Cout .
Величина индуктивности дросселя L пересчитывается в соответствии с формулой:

где:
qΔImax*– скорректированный коэффициент заполнения при котором пульсации тока максимальны;
VIN_max , VIN_min – максимальное и минимальное значение входного напряжения соответственно;
f – рабочая частота импульсного стабилизатора;
ΔIL - пульсации тока дросселя, определенные ранее из условия:
Изменение индуктивности приведет к необходимости пересчета конструкции дросселя и следующей итерация коррекции коэффициента заполнения.
Емкость выходного конденсатора фильтра Cout (минимальное значение) пересчитывается в соответствии с формулой:

где:
qΔImax – коэффициент заполнения при котором пульсации тока максимальны (пульсации напряжения максимальны когда максимальны пульсации тока).
VIN_max – максимальное входное напряжение;
L – индуктивность силового дросселя;
f – рабочая частота импульсного стабилизатора;
qΔImax – коэффициент заполнения при котором пульсации тока максимальны;
ΔVСout_disch – величина пульсаций на конденсаторе обусловленная его зарядом-разрядом. Величина пульсаций ΔVСout_disch выбирается в пределах 10-50% от величины выходных пульсаций ΔVOUT как указано ранее.